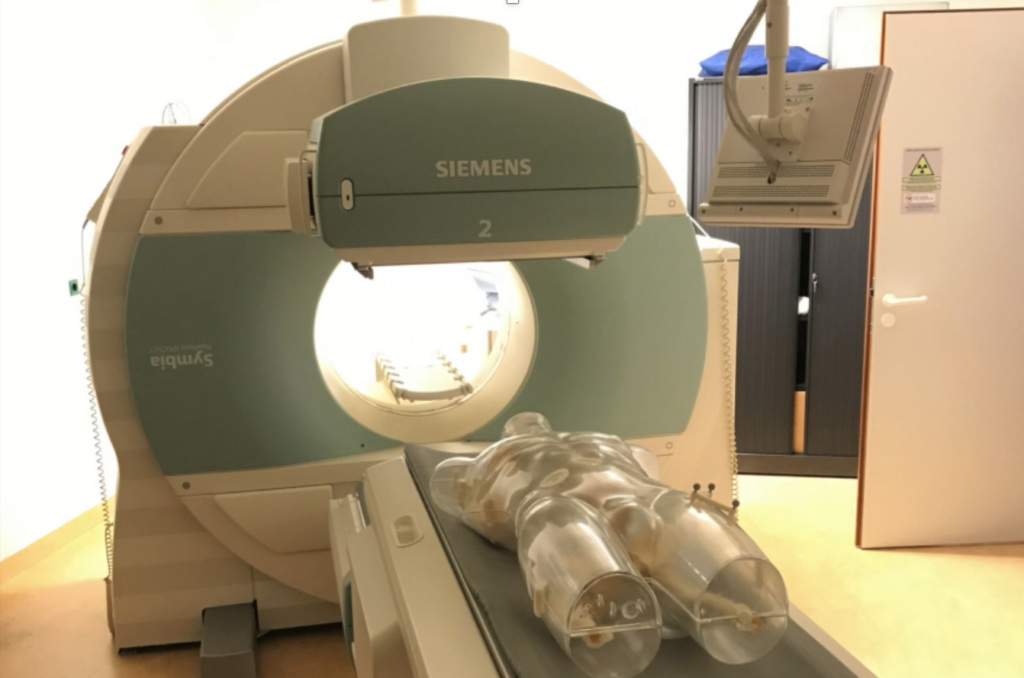
To investigate new image-guided surgery technology for a minimal invasive robotic setting, phantoms are created that are compatible with various forms of medical imaging and allow for the surgical robotic platform to be docked, simulating the eventual surgical application.