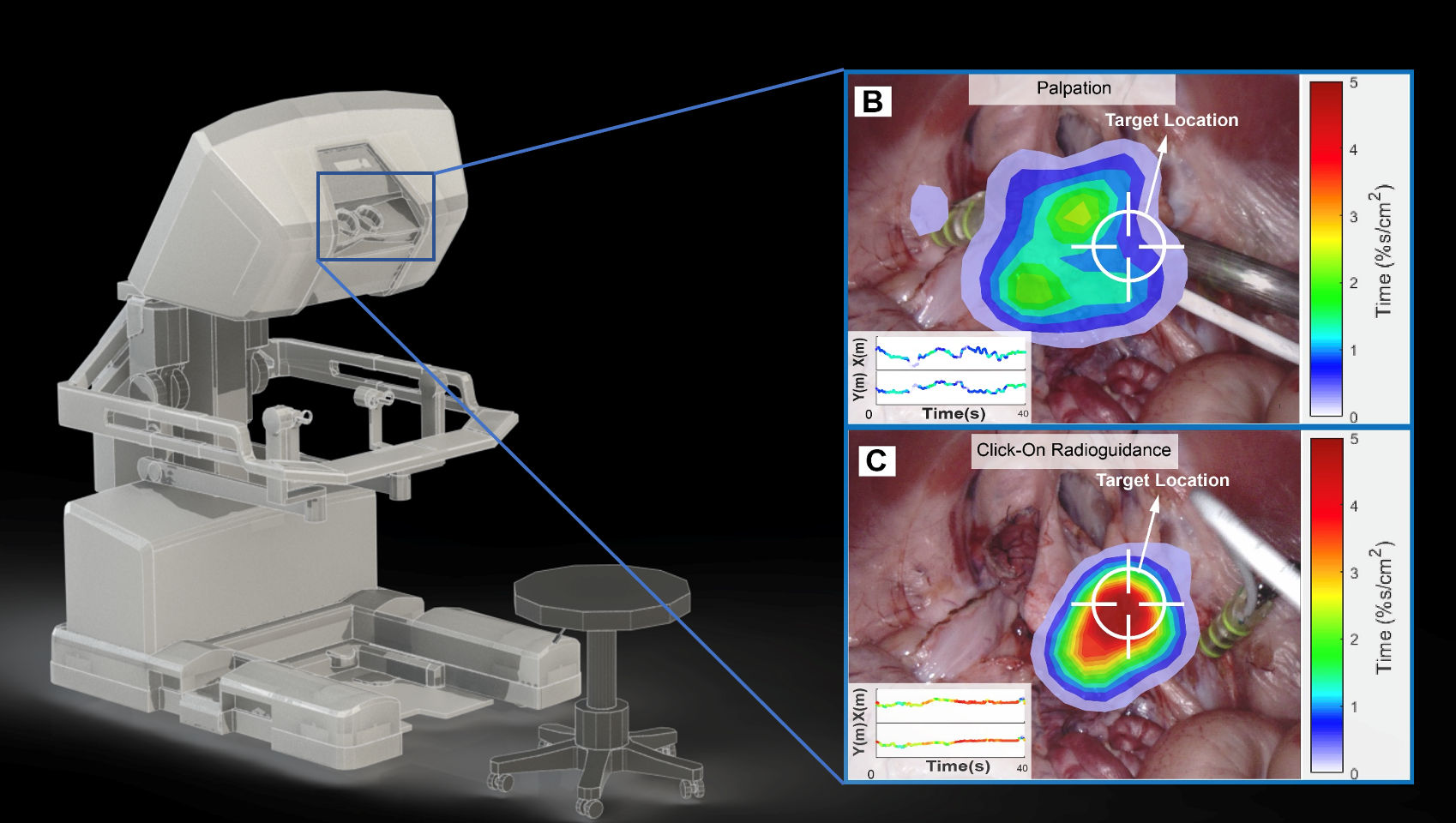
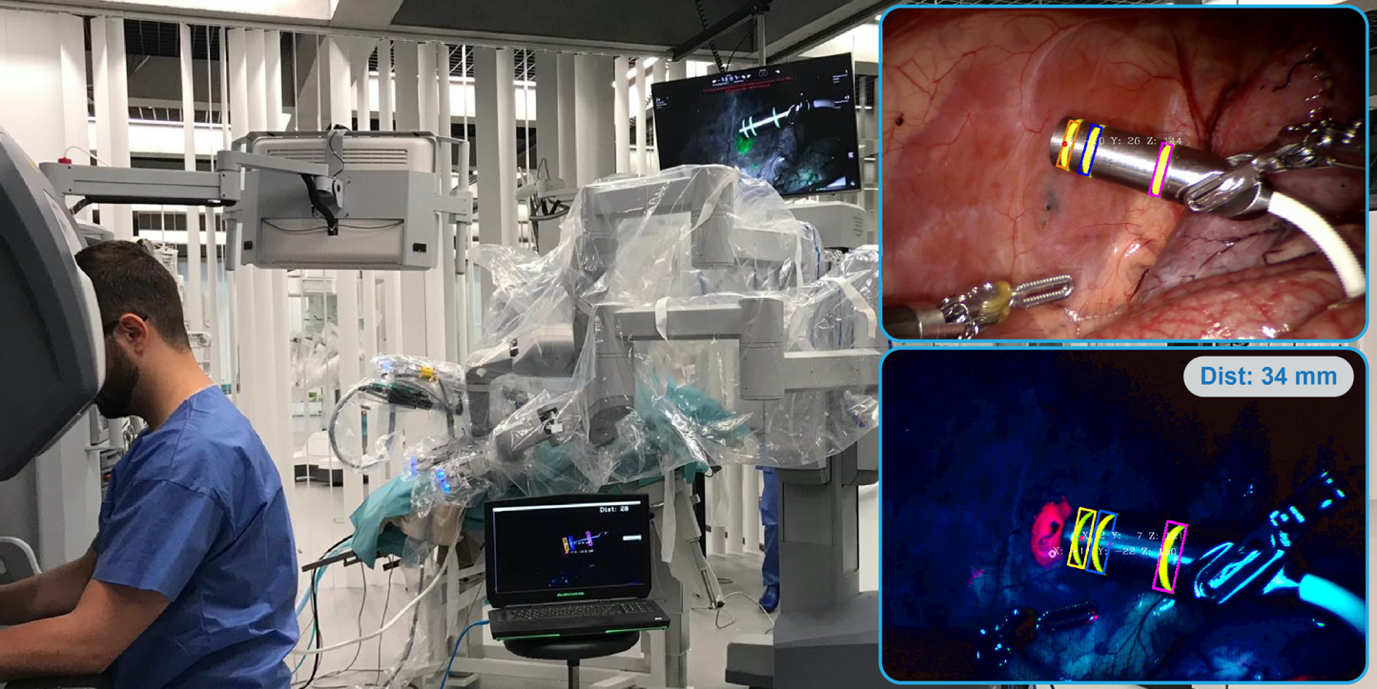
Decision-making and dexterity, features that become increasingly relevant in (robot-assisted) minimally invasive surgery, are considered key components in improving the surgical accuracy. In this project, motion tracking is used to study the added benefit of a novel tethered gamma detector.
Surgical Instrument Tracking